
VVT observations - current vs. advance
 11-24-2009 | 01:41 PM
11-24-2009 | 01:41 PM
#41

Newb
Joined: Sep 2009
Posts: 17
Total Cats: 0
From: Lynchburg, Va
Yes it is necessary to tune any VVT controller for each car it is applied to in order to see desired results and if you have a good exhaust setup you will see smaller gains. All VVT does is optimize scavenging which a good exhaust will already accomplish well. So on stock engines you will see good gains and with aftermarket parts those results will be less profound. Actually using a PID that recreates the stock controllers function would cause power loss on many turbo cars because you would over scavenge lower down causing you to lose good incoming air charge and under scavenge up high due to more back pressure of the turbo (Na car will then use that good tubular header and get effective scavenging at high rpm.) If you look at racing turbo setups they have intake and exhaust VVT to get the proper amount of control that is needed for a good turbo setup. The VVT controller uses an intake charge calculation and has constants that are derived experimentally. It also retards fuel injection and ignition in relation to the cam when VVT is active (read mazdas patent which states the use of these features.)
I would like to add that if several people running very similar cars built and tuned a controller than obviously it would work well for all of them.. It is just like adjustable cam gears which have to be tuned for every car except this is ALOT harder to tune.
I would like to add that if several people running very similar cars built and tuned a controller than obviously it would work well for all of them.. It is just like adjustable cam gears which have to be tuned for every car except this is ALOT harder to tune.
Last edited by noth1ngmuch; 11-24-2009 at 01:56 PM. Reason: Just wanted to add something
Reply
 0
0

0
 11-25-2009 | 11:00 AM
11-25-2009 | 11:00 AM
#43

There's a touch more involved as I moved up to a complete '01 engine from the '99. So there was a small bump in compression. A proper tune didn't hurt either  .
.
I'm still here. I'm awaiting a few test results from a gentleman in California. After that goes well, I'll start packaging them up and what not.
I've been running the controller on my car for a little over 1000 miles now with no issues.
On the contrary. With a proper controller, tuning becomes a lot easier as no mechanical adjustments have to be made as opposed to those of a purely mechanical adjustable gear. Simply change a cell or 6 on the fly and watch for results (on a dyno of course).
.I've been running the controller on my car for a little over 1000 miles now with no issues.
On the contrary. With a proper controller, tuning becomes a lot easier as no mechanical adjustments have to be made as opposed to those of a purely mechanical adjustable gear. Simply change a cell or 6 on the fly and watch for results (on a dyno of course).
Reply
0
0
11-25-2009 | 03:54 PM
#44
Newb
Joined: Sep 2009
Posts: 17
Total Cats: 0
From: Lynchburg, Va
How hard it is to turn a screw vs how hard it is to understand the working of a system to accurately change numbers in a cell that affect the control of a system is a matter of your background but yea for the lazy smart guy that is easier. On a turbo car you will see huge gains in adding VVT to the exhaust and controlling the two independently. I would like an explanation of the 32 HP. Is that mid range average power gains?? The purpose of it being variable is to see power gains though a spectrum, or else if that is peak you can get that from just taking your timing belt off and just advancing timing to increase peak power. I don't doubt you see gains through the mid range but I know I am missing something. Also due you know how well this works on cars with designed exhaust? Is that what you are testing? Sorry, but I just can't help thinking that you would see this setup more in racing (It isn't illegal that I know of) if it wasn't only a plus for cars with emissions restrictions (intake and exhaust system rules). Also on a turbo car it would seem that Toyota uses VVT on the exhaust side as that is where you see the bottle neck. The intake velocities are sufficient to drive the scavenging, but the back pressure on the exhaust side prevents complete scavenging so increasing the retard (I think) would most benefit you. Also all VVT systems that are commercial have a fuel and ignition control based on load and RPM to them I amuse to protect components of the engine. Does yours handle this or is it unnecessary to do so (I doubt you would see it on all of them if it had no purpose...). Might have something to due with safety measure against detonation (or ignition possibly in some instance or rapid release of throttle) with the valves wide open (yes I know the cam sensor does this, but it is mentioned in their patent that there is a additional delay of the ignition which at the least would need to be added to the maps unless you are just not counting on ever getting bad gas). I just would like to know a little more on what this control takes into account.
Reply
0
0
11-26-2009 | 01:48 PM
#45
Whew, that's hard to read. Go put in some paragraph breaks. :-)
As to what it reads, you'll have to read the thread, I know it's all in there. But I'll chime in as well - I'd love to see a summary post as well - what it does, how it works, how big it is, maybe a picture or two.
A refresher as it were. :-)
As to what it reads, you'll have to read the thread, I know it's all in there. But I'll chime in as well - I'd love to see a summary post as well - what it does, how it works, how big it is, maybe a picture or two.
A refresher as it were. :-)
Reply
0
0
12-01-2009 | 12:00 AM
#46
How hard it is to turn a screw vs how hard it is to understand the working of a system to accurately change numbers in a cell that affect the control of a system is a matter of your background but yea for the lazy smart guy that is easier. On a turbo car you will see huge gains in adding VVT to the exhaust and controlling the two independently. I would like an explanation of the 32 HP. Is that mid range average power gains?? The purpose of it being variable is to see power gains though a spectrum, or else if that is peak you can get that from just taking your timing belt off and just advancing timing to increase peak power. I don't doubt you see gains through the mid range but I know I am missing something. Also due you know how well this works on cars with designed exhaust? Is that what you are testing? Sorry, but I just can't help thinking that you would see this setup more in racing (It isn't illegal that I know of) if it wasn't only a plus for cars with emissions restrictions (intake and exhaust system rules). Also on a turbo car it would seem that Toyota uses VVT on the exhaust side as that is where you see the bottle neck. The intake velocities are sufficient to drive the scavenging, but the back pressure on the exhaust side prevents complete scavenging so increasing the retard (I think) would most benefit you. Also all VVT systems that are commercial have a fuel and ignition control based on load and RPM to them I amuse to protect components of the engine. Does yours handle this or is it unnecessary to do so (I doubt you would see it on all of them if it had no purpose...). Might have something to due with safety measure against detonation (or ignition possibly in some instance or rapid release of throttle) with the valves wide open (yes I know the cam sensor does this, but it is mentioned in their patent that there is a additional delay of the ignition which at the least would need to be added to the maps unless you are just not counting on ever getting bad gas). I just would like to know a little more on what this control takes into account.
------------
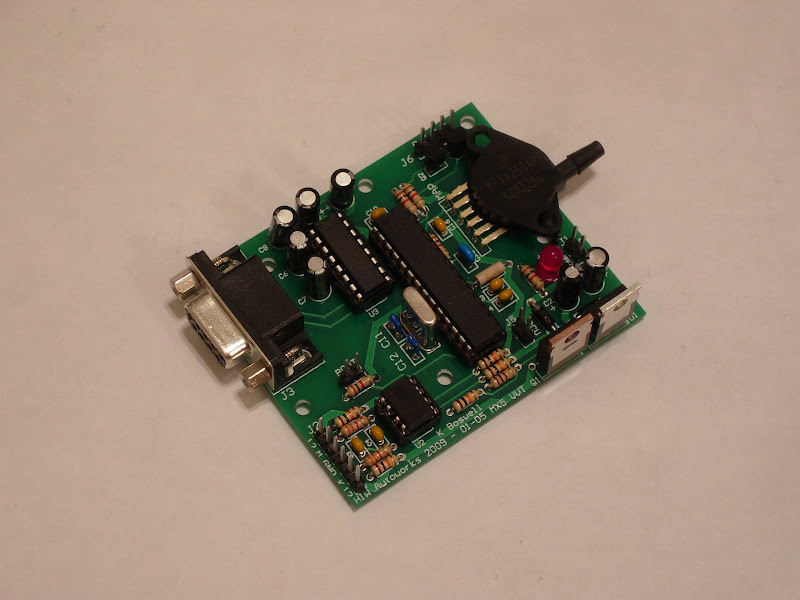
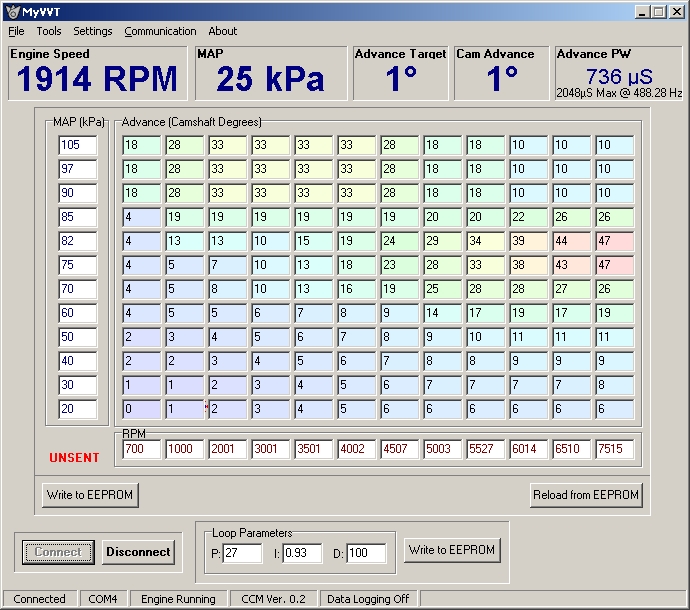
This controller provides tunability of the intake camshaft throughout it's entire range of movement based on engine load derived from manifold pressure (Y-axis) and RPM (X-axis). A camshaft set-point is extrapolated from a 12x12 table, in which the user defines where the camshaft will "land" based on the current engine state. Furthermore, the MAP and RPM settings can be dialed-in through a range of 12 associated X-Y entries.
During operation, the current camshaft position is calculated in relation to the crankshaft's position using OE sensors and pickups. If any deviation exists from the set-point, it, as well as the extrapolated set point, is input into a PID loop. The result of the PID loop defines the duty cycle of the 12 volt signal sent to the OCV, therefore regulating the oil pressure to the spool valve. Once the PID loop is properly tuned, anomalies such as varying oil viscosity and mechanical lag time can nearly be disregarded. The tuned value applies to the entire camshaft spectrum and need not be dynamic. In the case of my application, the set-point is achieved in the order of 10-20ms.
With any tunable EMS, there is a degree of user error that can cause damage to an engine that cannot be accounted for. For example, one can dial-in too much advance at high boost/load levels. Likewise in the case of this controller, one can dial-in advance values in adjacent cells that cause changes in the camshaft advance that occur too quickly (I.E. full advance to full retard), potentially allowing valve float. As with any system, the ideal solution is to perform ALL tuning on a dyno.
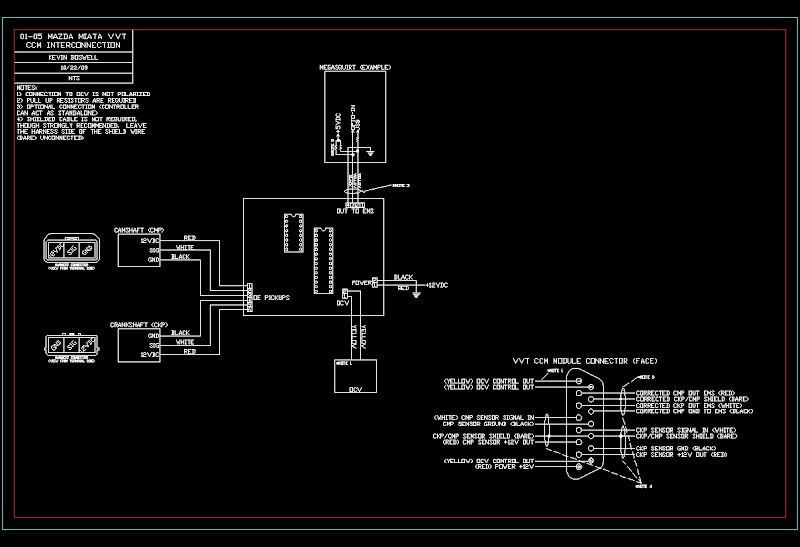
Additionally, the controller generates a pair of outputs that can be connected to a MegaSquirt or other EMS to establish proper tach/trigger signals.
Whew, that's hard to read. Go put in some paragraph breaks. :-)
As to what it reads, you'll have to read the thread, I know it's all in there. But I'll chime in as well - I'd love to see a summary post as well - what it does, how it works, how big it is, maybe a picture or two.
A refresher as it were. :-)
As to what it reads, you'll have to read the thread, I know it's all in there. But I'll chime in as well - I'd love to see a summary post as well - what it does, how it works, how big it is, maybe a picture or two.
A refresher as it were. :-)
The tuning app:
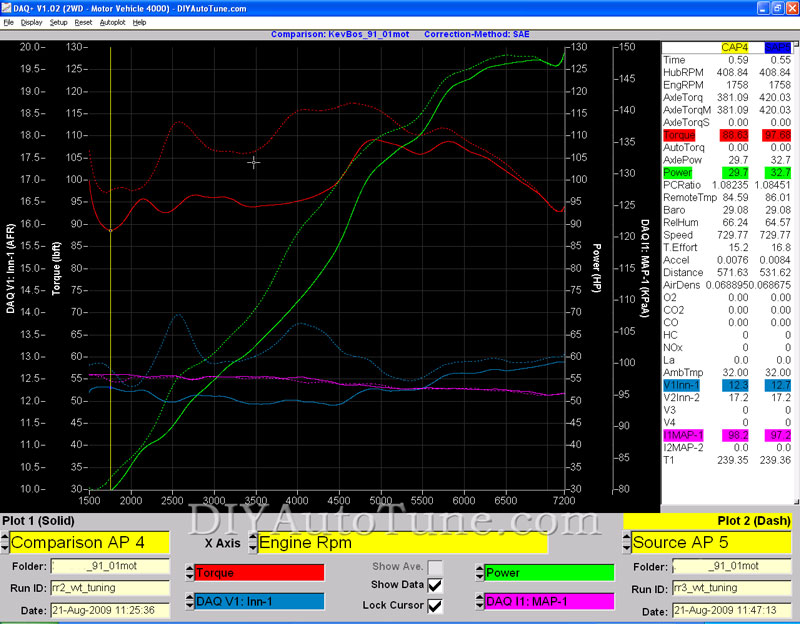
Dyno results (solid line is without controller, dotted line is with controller):
A series of pics throughout the process can be found http://picasaweb.google.com/kcbhiw/MiataVVTControllerPrototype?feat=directlink
I'm sure I'm forgetting a detail or two. I'm happy to answer questions as they arise
.As a side note, the 32 HP gained was the current setup with VVT over the previous '99 engine that was installed.
Reply
0
0
12-01-2009 | 11:47 AM
#48
Newb
Joined: Sep 2009
Posts: 17
Total Cats: 0
From: Lynchburg, Va
okay I was not try to put down your work. I do apologize being it even to me does come off that way.
I have looked into the development of a controller and my skepticism came mainly from the inability to make more or less a OEM quality of reliability without just massive amounts of variables that are needed to take into account to prevent error for all cars. I have a bad habit of wanting to make things work at 100% and have no theoretical possibility of failure due to anything other than wear. From what I can tell the stock setup takes everything into account and is conservative in every way and makes almost 100% theoretically reliable. In college where you have nearly limitless time and resources and nothing has to be real world practical you lose site of what real world development and practicalities are. That and I was just to hasty. My apologies to both Keven and Abe and everyone else for interrupting your thread.
Heck I am still screwing with Abe's board and the software trying to get all the abnormalities out of it such as the long crank time and random loss of sync. Not to get off topic, but Abe has any one found anything on those.
I have looked into the development of a controller and my skepticism came mainly from the inability to make more or less a OEM quality of reliability without just massive amounts of variables that are needed to take into account to prevent error for all cars. I have a bad habit of wanting to make things work at 100% and have no theoretical possibility of failure due to anything other than wear. From what I can tell the stock setup takes everything into account and is conservative in every way and makes almost 100% theoretically reliable. In college where you have nearly limitless time and resources and nothing has to be real world practical you lose site of what real world development and practicalities are. That and I was just to hasty. My apologies to both Keven and Abe and everyone else for interrupting your thread.
Heck I am still screwing with Abe's board and the software trying to get all the abnormalities out of it such as the long crank time and random loss of sync. Not to get off topic, but Abe has any one found anything on those.
Reply
0
0
12-01-2009 | 05:37 PM
#50

Thread Starter
Elite Member
Joined: Jul 2005
Posts: 6,420
Total Cats: 84
Yes it is necessary to tune any VVT controller for each car it is applied to in order to see desired results and if you have a good exhaust setup you will see smaller gains. All VVT does is optimize scavenging which a good exhaust will already accomplish well. So on stock engines you will see good gains and with aftermarket parts those results will be less profound.
With intake VVT, you are trading off late intake valve closing (good for high RPM breathing), and early intake valve opening (good for scavenging). A turbo car in a way acts like an n/a motor with a restrictive exhaust; indeed if you compare y8s' turbo VVT experimental results with the n/a dude on miataforum, you will see a more dramatic change in the torque curves in the n/a case.
Reply
0
0
 12-01-2009 | 10:41 PM
12-01-2009 | 10:41 PM
#52
okay I was not try to put down your work. I do apologize being it even to me does come off that way.
I have looked into the development of a controller and my skepticism came mainly from the inability to make more or less a OEM quality of reliability without just massive amounts of variables that are needed to take into account to prevent error for all cars. I have a bad habit of wanting to make things work at 100% and have no theoretical possibility of failure due to anything other than wear. From what I can tell the stock setup takes everything into account and is conservative in every way and makes almost 100% theoretically reliable. In college where you have nearly limitless time and resources and nothing has to be real world practical you lose site of what real world development and practicalities are. That and I was just to hasty. My apologies to both Keven and Abe and everyone else for interrupting your thread.
Heck I am still screwing with Abe's board and the software trying to get all the abnormalities out of it such as the long crank time and random loss of sync. Not to get off topic, but Abe has any one found anything on those.
I have looked into the development of a controller and my skepticism came mainly from the inability to make more or less a OEM quality of reliability without just massive amounts of variables that are needed to take into account to prevent error for all cars. I have a bad habit of wanting to make things work at 100% and have no theoretical possibility of failure due to anything other than wear. From what I can tell the stock setup takes everything into account and is conservative in every way and makes almost 100% theoretically reliable. In college where you have nearly limitless time and resources and nothing has to be real world practical you lose site of what real world development and practicalities are. That and I was just to hasty. My apologies to both Keven and Abe and everyone else for interrupting your thread.
Heck I am still screwing with Abe's board and the software trying to get all the abnormalities out of it such as the long crank time and random loss of sync. Not to get off topic, but Abe has any one found anything on those.
. It sounds like you have a good handle on the analytical approach, though much of it may not be necessary in this realm. I am on board with you in approaching OEM reliability becuase I, like most of us I assume, don't like re-doing things, especially when they break. However, in the case of a one-off "experiment" like most our car projects are, many approaches that a manufacturer takes can be set aside or even ignored as long as proper comprimises are made.BTW, you're not interrupting. You made some valid points.
At this point, I'd rather not share the code, though I may be willing to work with a motivated person or two to improve upon it. I'd certainly be happy to share some insight.
That is correct! The controller can act in a standalone manner along side any ECU without interaction.
Reply
0
0
12-02-2009 | 12:00 PM
#55
Thread Starter
Elite Member
Joined: Jul 2005
Posts: 6,420
Total Cats: 84
P.S. If you wrote it in C, I can maybe improve the control loop as I have done a coupld of industrial control loop designs. I notice for example, that you have overshoot when the target goes down, but not so much when the target moves up. (see graph you show). This suggests a different set of values for the PID coefficients when the phase is below vs. above the target.
Reply
0
0
12-03-2009 | 11:34 PM
#56
The code is indeed written in C.
P.S. If you wrote it in C, I can maybe improve the control loop as I have done a coupld of industrial control loop designs. I notice for example, that you have overshoot when the target goes down, but not so much when the target moves up. (see graph you show). This suggests a different set of values for the PID coefficients when the phase is below vs. above the target.
I'll collect a better data sample in the next few days and overlay the MAP, RPM, target, and advance values properly. Logging is currently fairly limited as I am writing to a CSV file and plotting in excel (as seen in the aforementioned plot).
Would you mind PMing with your email addy?
Allow me a bit more time to sort out final testing
.
Last edited by kcbhiw; 12-04-2009 at 12:02 AM.
Reply
0
0
 12-07-2009 | 04:50 PM
12-07-2009 | 04:50 PM
#59
Nice! I like the board, even the layout!
If you're having an issue with my board, please post in the thread about my board. Long starts are either settings (Matt would probably have a better idea than I!), or just that MS-II starts very slow on our cars. Watch it on the stim, there's no fuel injected for several rotations.
If you're having an issue with my board, please post in the thread about my board. Long starts are either settings (Matt would probably have a better idea than I!), or just that MS-II starts very slow on our cars. Watch it on the stim, there's no fuel injected for several rotations.
Reply
0
0





